This are my notes to install home-assistant on a raspberry-pi 3. At the end, this is a multipart how-to for installing home-assistant and mosquitto (MQTT) with a NodeMCU and some magnetic contacts.
network={
ssid=”YourWLANSSID”
#psk=”yourWLANPassword” <<<<<—– REMOVE THIS COMMENTED LINE!
psk=131e1e221f6e06e3911a2d11ff2fac9182665c004de85300f9cac208a6a80531
}
You have a fixed IP? (preferred!)
Edit /etc/dhcpcd.conf and set the hostname inside this file.
Add config for your interface:
interface wlan0
static ip_address=192.168.0.XXX/24
static routers=192.168.0.XXX
static domain_name_servers=XXX.XXX.XXX.XXX, XXX.XXX.XXX.XXX
static domain_search=some.domain.com
static domain_name=some.domain.com
Use raspi-config to configure your raspberry hostname and partition then reboot.
Change into the unzipped directory and execute make:
cd dump1090-master/
make
Plug in your DVB-T stick and launch dump1090:
./dump1090 --interactive --net
The option “interactive” tells the program to output planes with automatically refreshed screen every second
The option “net” enables networking support.
After a few seconds you should see the first planes:
You can even connect with your webbrowser to http://127.0.0.1:8080 to see the planes on a map.
Now you should see planes near you. It’s best to go outside with your antenna to track airplanes. You can even build better antennas 😉 See the links below.
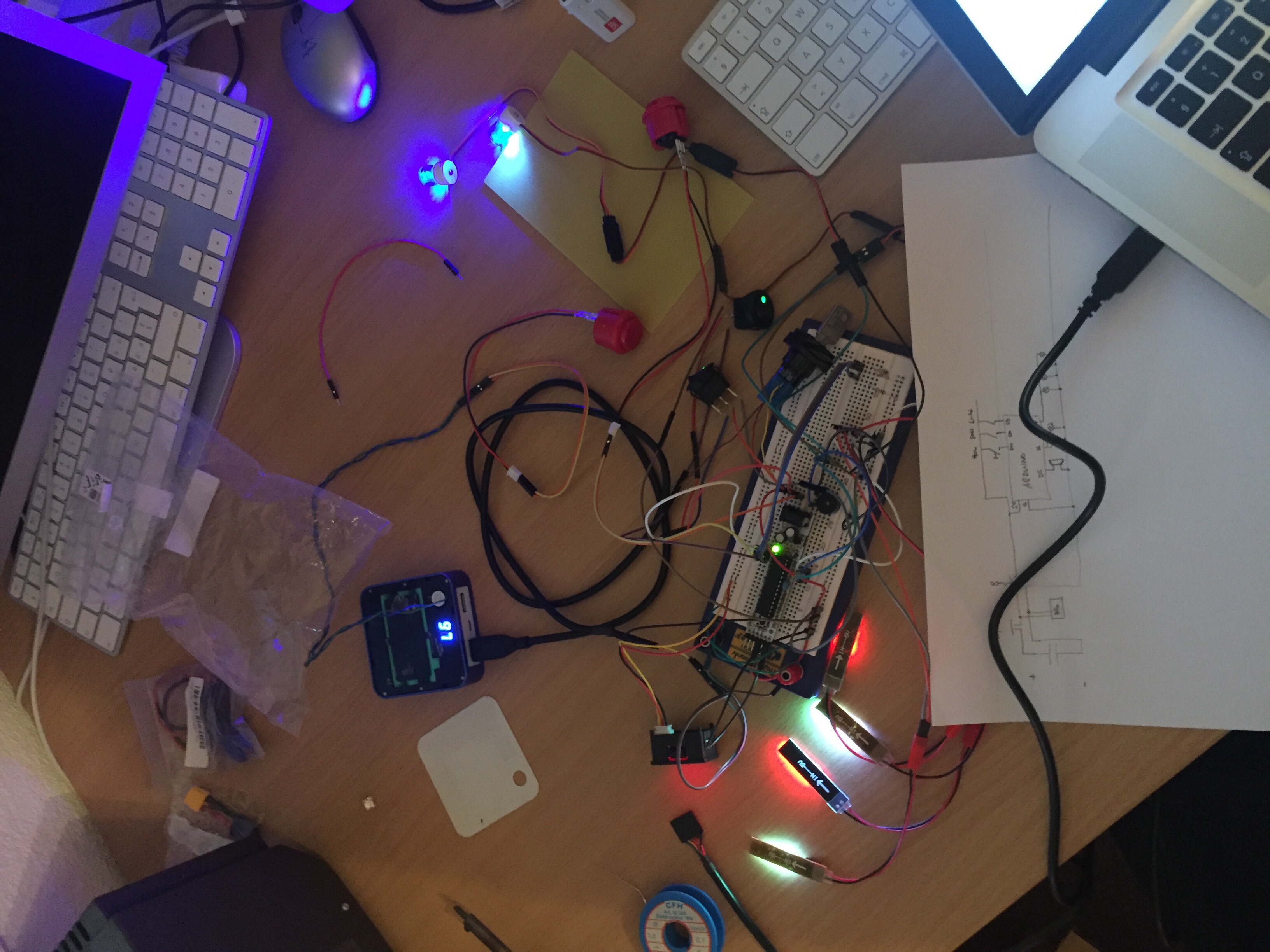
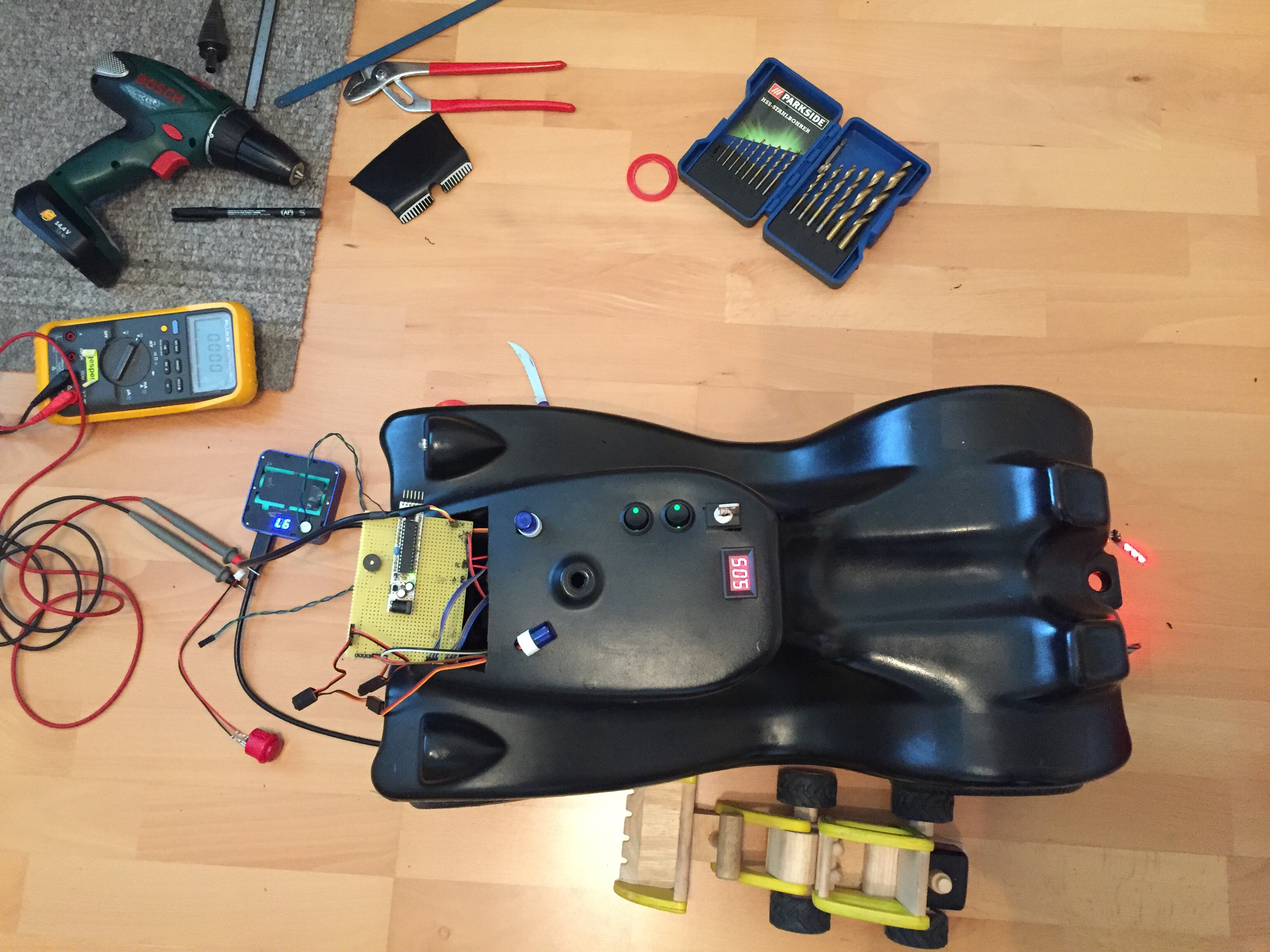
A project I’m currently working on, is the Arduino powered Bobbycar for my Son.
Because my Son is currently so interested in Switches / Buttons and Lights, I decided to add some on his Bobbycar with future extension possibilities.
I did not want to destroy his new Bobbycar, a gift from his Godmother. So I bought a used one (with trailer) for 20 bucks on ricardo.
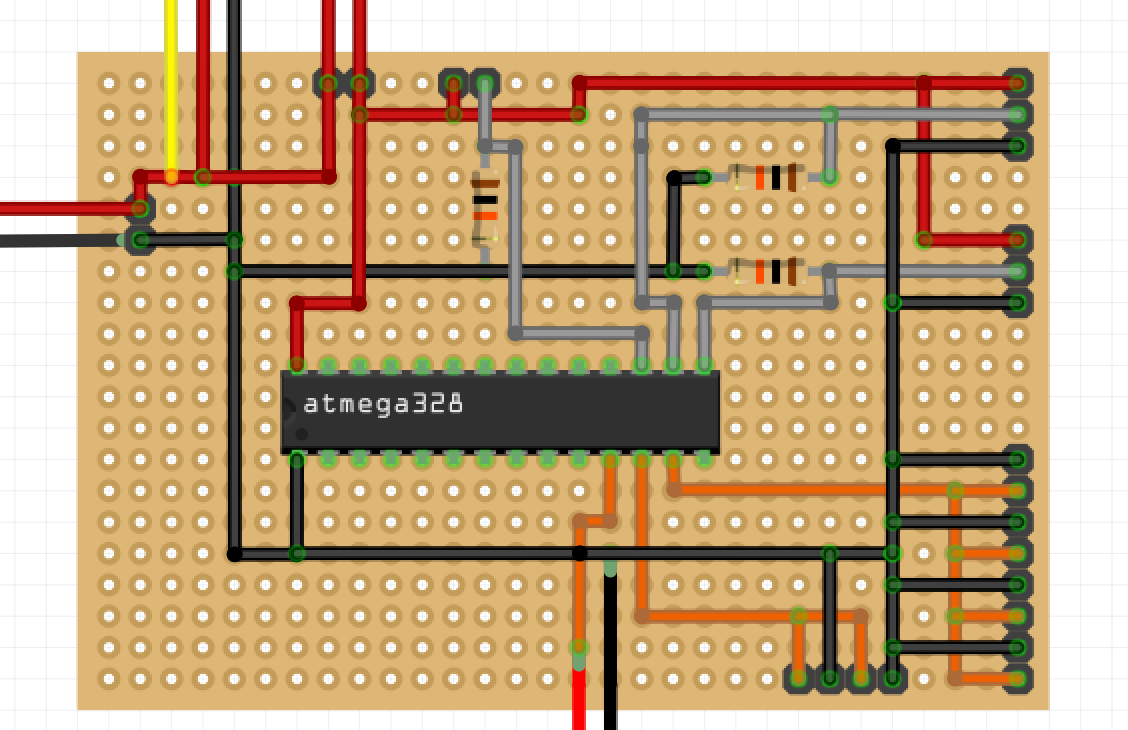
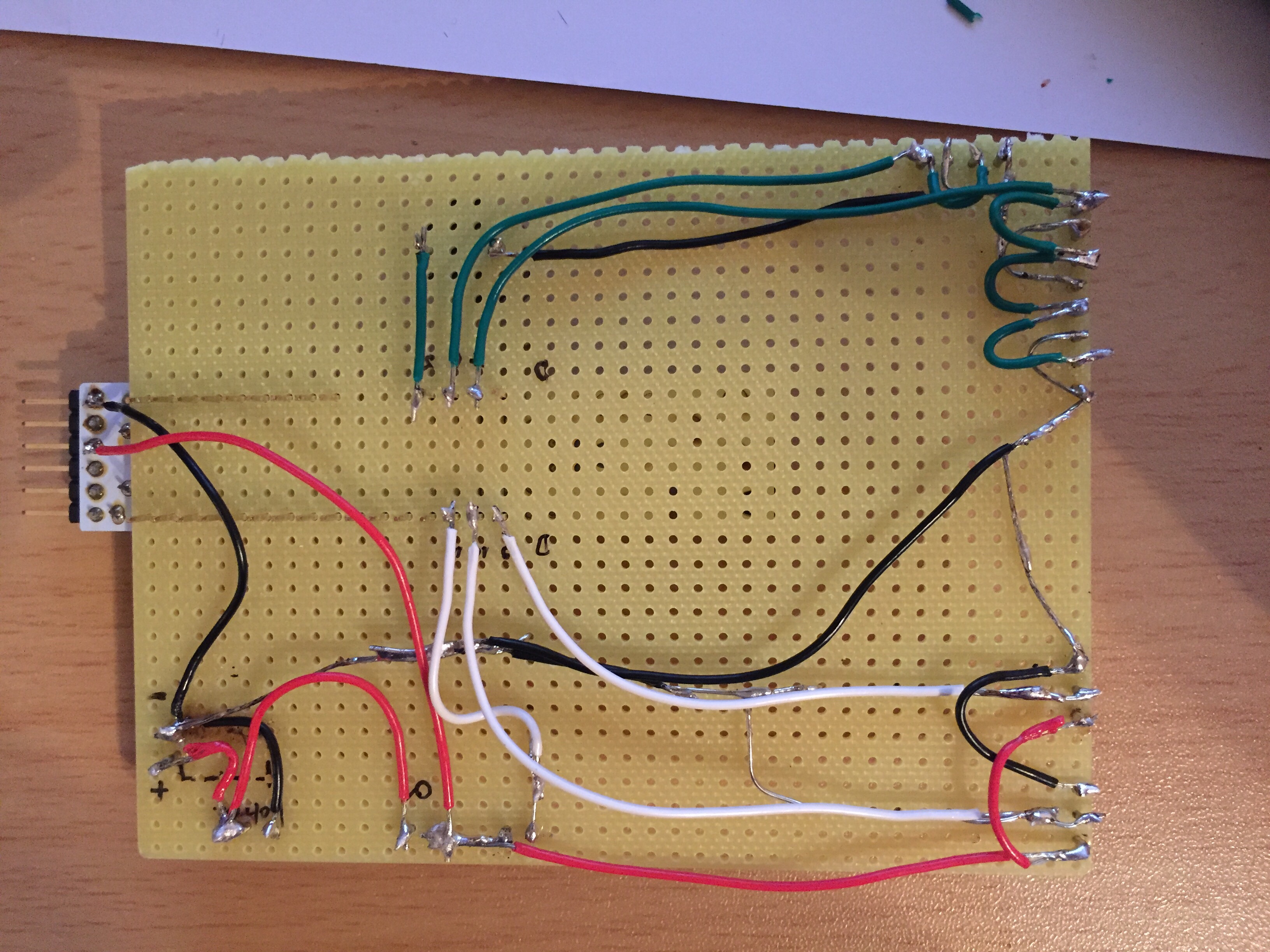
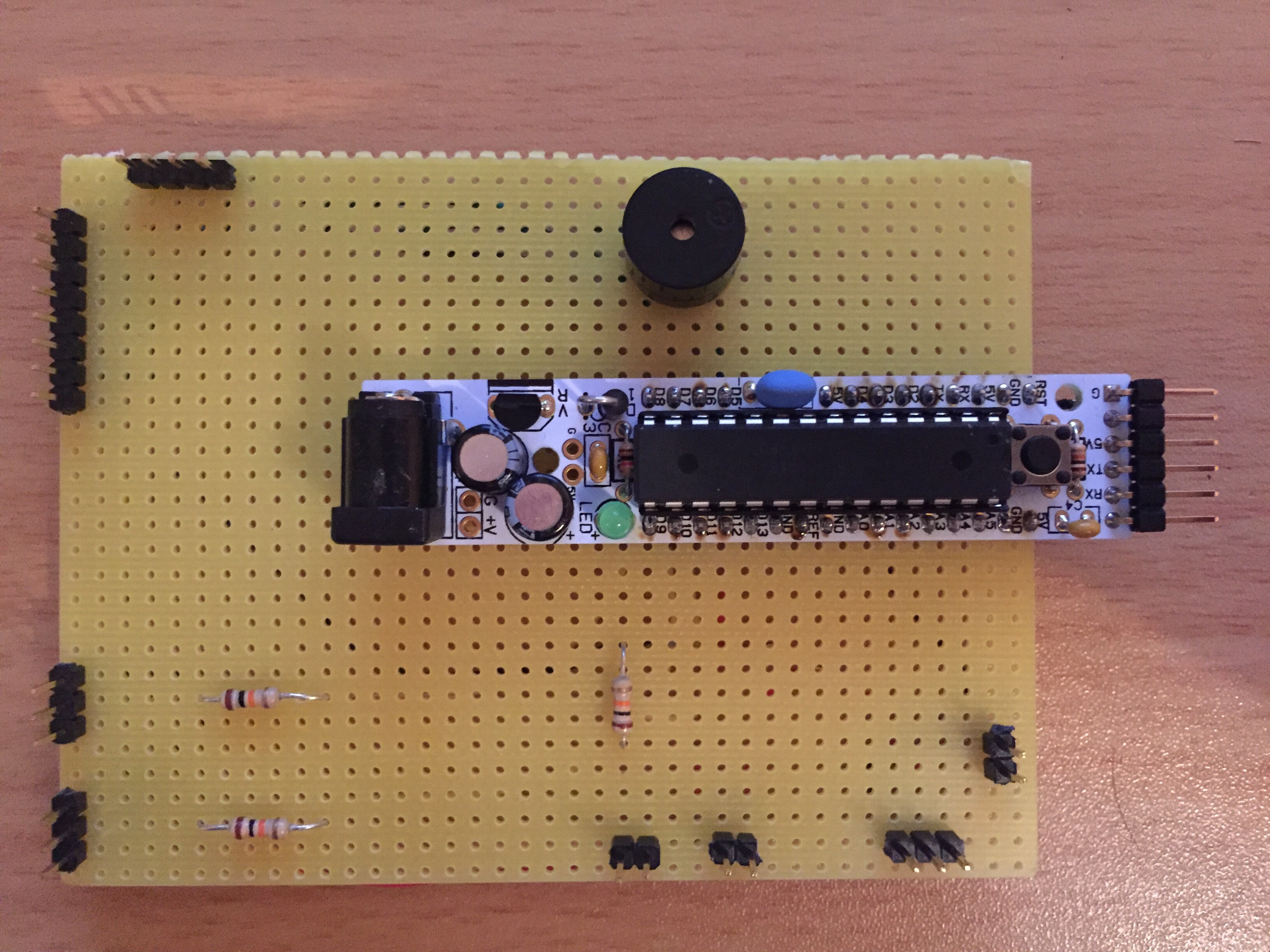
Prototype cabling & programming the RBBB (Also already used in this Project):
Heute habe ich meinen Multikoper mit LED’s ausgestattet. Der verwendete Chip auf den LED Streifen ist ein LPD8806 für welchen es bereits eine Library für den Arduino gibt.
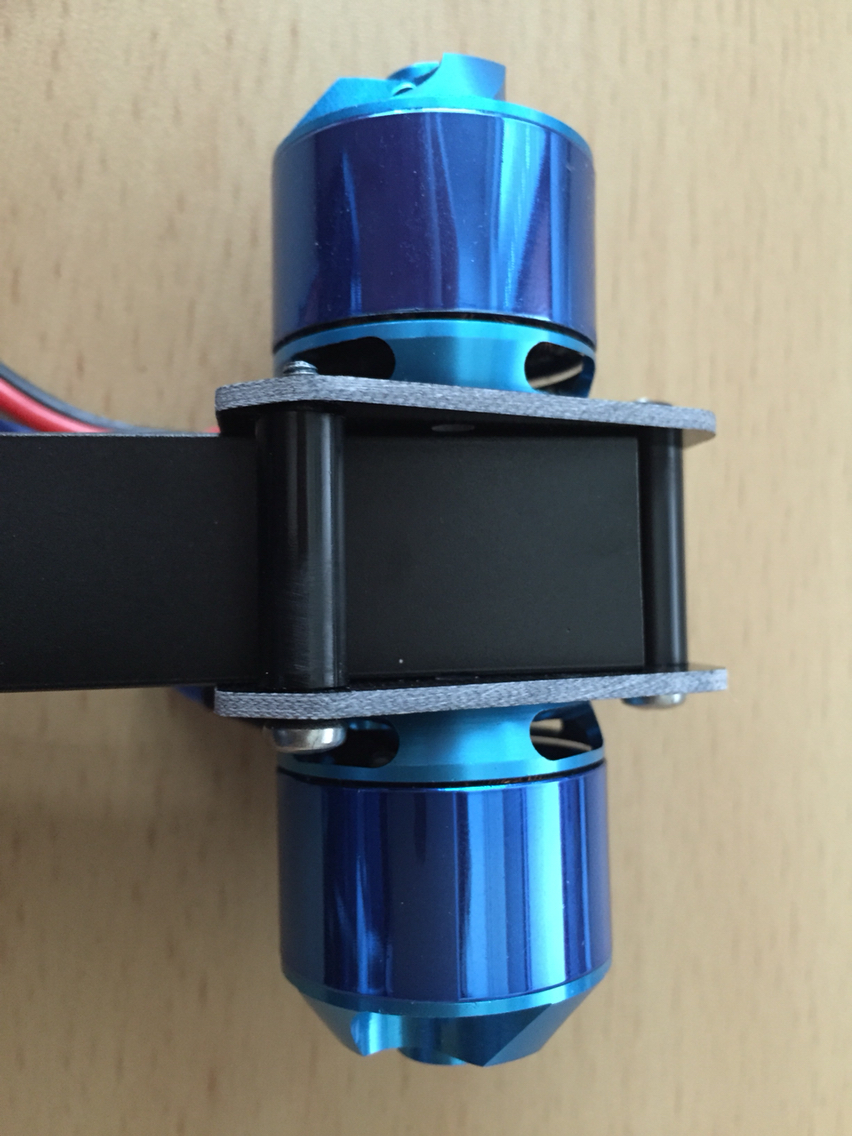
So, wieder einmal ein Bastelprojekt begonnen 🙂 Ich habe mir den Do-It-Yourself Y6 Kit von 3DRobotics bestellt. Dabei handelt es sich um einen Multikopter in Y-Form und 6 gegenläufigen brushless outrunner Motoren (je einer unten und einer oben). Da ich Freund von Opensource/Openhardware bin, habe ich natürlich keinen fixfertigen DJI Phantom oder 3DR Iris gekauft.
Ich verwende den Begriff “Drohne” extra nicht, da er mir zu militärisch erscheint. Mit Drohnen verbinde ich die unbemannten Militärflugzeuge, welche Bomben abwerfen. Der Multikopter ist eher das, was ich im Wohnzimmer fliegen lasse. Noch ganz allgemeiner lassen sich die Fluggeräte einfach “UAV” nennen (Unmanned Aerial Vehicle).
Zurück zum Y6. Eigentlich ist er zu gross und zu gefährlich, um diesen im Wohnzimmer fliegen zu lassen. Es kann viel passieren, selbst mit kleinen Multikoptern:
Damit gefahrlos geflogen werden kann, sollte folgendes beachtet werden:
– Vor dem Flug alle Schrauben, Kabel, Batterien prüfen
– Nur im Freien mit viel Platz fliegen, gute Wetter/Windverhältnisse
– In der Schweiz muss man ab 500 Gramm Abfluggewicht eine Haftpflichtdeckung von mind. 1Mio. CHF haben
– Ab 30kg wird eine Flugbewilligung benötigt
– Nicht über grössere Personenmengen fliegen (mind. 100m Abstand!)
– Nur auf Sicht und nicht in der Nähe von Flugplätzen (5km Abstand) fliegen!
-> Siehe auch die nützlichen Links am Ende des Artikels.
Der Multikopter unterstützt verschiedene Flugmodi, hier ein Video vom ersten Testflug im Loiter-Modus. Hierbei hält der Multikopter automatisch Position und Höhe, ohne dass etwas gemacht werden muss. So kann man sich z.B. auf Fotos/Videos konzentrieren:
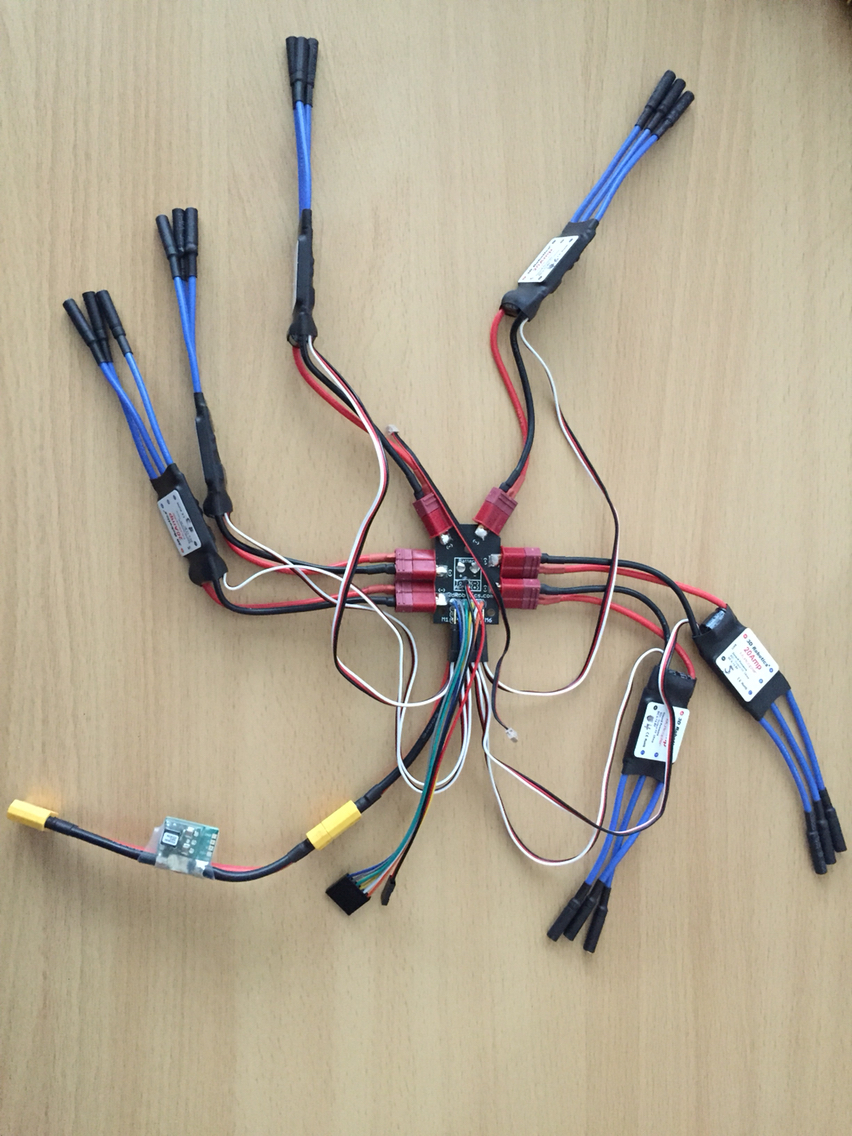
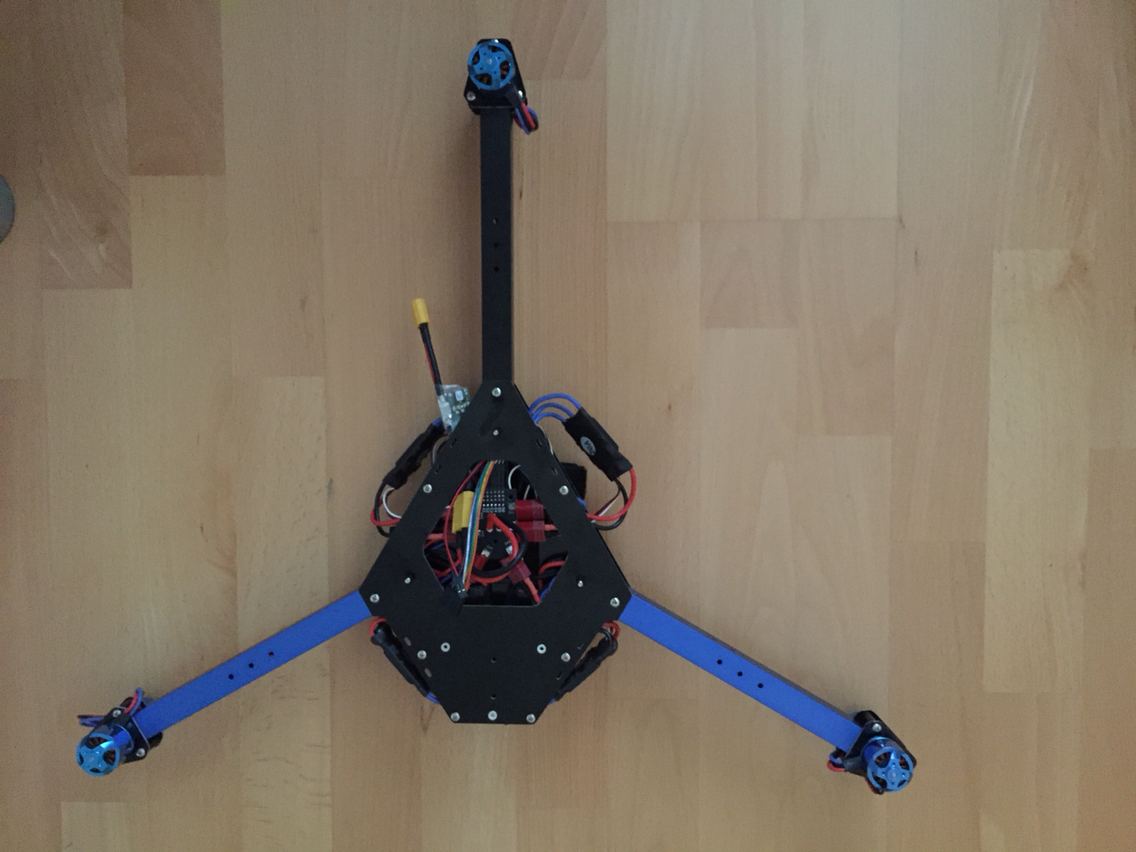
Der Zusammenbau des Multikopters ist eigentlich ganz einfach und in einem halben Tag erledigt. Lediglich die ganzen Kabel der ESC’s und Motoren zwischen die beiden Platten zu zwängen hat mich ein bisschen Zeit gekostet. Hier ein paar Bilder vom Aufbau:
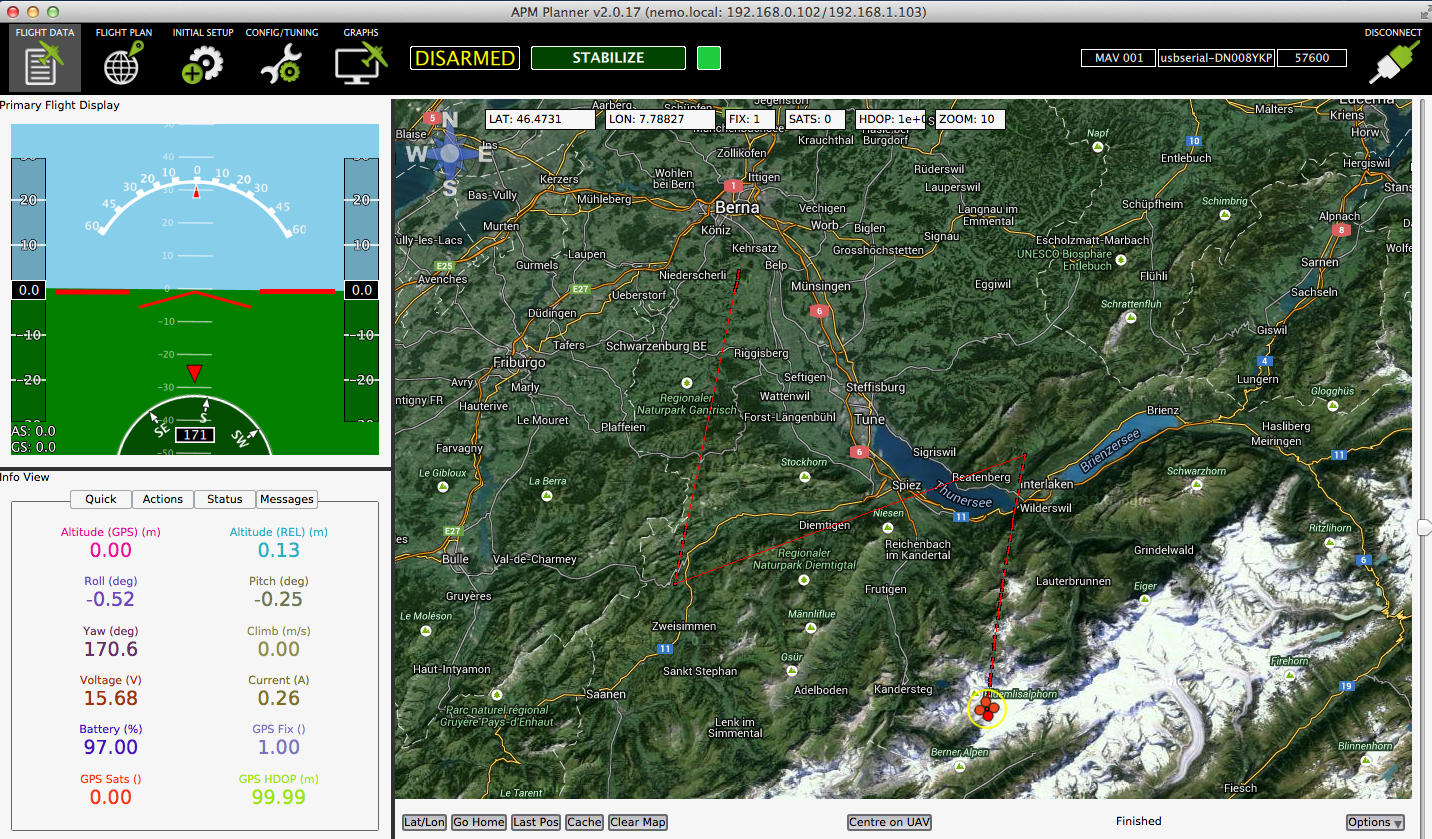
Nach dem Aufbau muss das ganze System kalibriert werden. Dazu werden Magnetometer, Gyroskop, die ESC’s und die Fernsteuerung kalibriert. Dies erfolgt alles über die Bodenstation. Damit dies auch ohne USB-Kabel geht, habe ich zusätzlich einen Telemetriefunk eingebaut, womit der Copter über Funk mit der Bodenstation in Verbindung bleibt. Hier ein Screenshot wie dies mit dem APM-Planner aussieht:
Der Multikopter kann mit oder ohne Bodenstation geflogen werden, jedoch ist es von Vorteil das Notebook mit dabei zu haben, denn damit kann neu kalibriert oder eventuelle Fehlercodes ausgelesen werden.
Der Kopter hat nun ein Abfluggewicht von knapp über 2kg. Es können noch ca. 600 Gramm zusätzlich beladen werden, dies wird dann später mal eine Kamera sein. Genau hier liegt der Vorteil dieses Kopters, er ist modular. Man kann ihn sozusagen mal fliegen, wenn man will kann man die Telemetrie erweitern, dann das Kamera-Gimbal und zu guter Letzt sogar eine FPV (First Person View) Kamera montieren.
[UPDATE]: Mittlerweile habe ich ein Kamera-Gimbal für die GoPro montiert, die technischen Details sowie erste Fotos findet ihr in der separaten Rubrik “Multicopter” oben in der Menüleiste.